 Alexandre_Pare
Alexandre_Pare
@Sebastien
I did some testing for you. The incorrect scanning position is due to where the initial position of the snapshot where scanning process is initiated. In the first test I tried to place the grid as close to the robot as possible and everything went fine. On one of the snapshots you can even see joint 2 of the robot, which shows you how close the grid was to the robot.
Here is a picture showing the position of the grid compared to the robot base.
Then I tried it with the grid far from the robot such that I knew it would get off limit during the scanning. Here is a picture showing the robot at snapshot position:
And here is the error that popped up when it figured out its next position was off limit!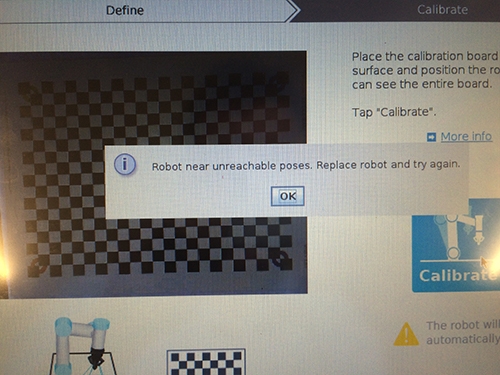

The Dof Community was shut down in June 2023. This is a read-only archive.
If you have questions about Robotiq products please reach our support team.
If you have questions about Robotiq products please reach our support team.
I have a question regarding the camera.
If one of your positions in your scan fails, how do you get around that?