
The Dof Community was shut down in June 2023. This is a read-only archive.
If you have questions about Robotiq products please reach our support team.
If you have questions about Robotiq products please reach our support team.
A partner recently asked me how he could unstack parts with the camera from multiple locations.

![]()
![]()

I created this program template that does just that.
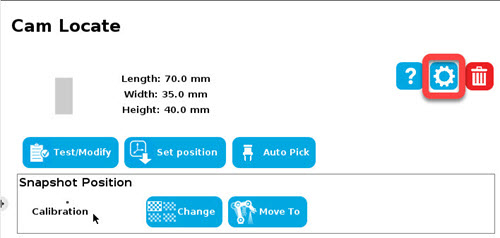
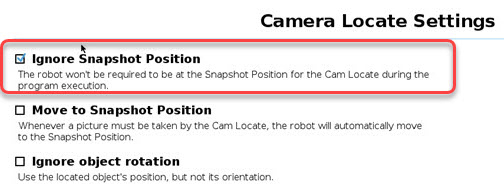
Teach your object in the cam locate node, then select the ignore snapshot position option from the cam locate setting menu
Robot will then start from position one until it can't detect any part then it will move to point 2 and so on.
Once at position 4, if no part is being detected, the layer is changed, the snapshot position is offsetted, and the current pos is set to 1 so the robot will retake a picture from pos one on the next layer. A popup will appear asking to remove the interlayer.
You can download the video and the program template below.
Note: The camera can tolerate approximately +-10% scaling when detecting an object. Therefore if the thickness of your object is relatively small, it is possible that the camera detects the part of the layer underneath if there is no part on the layer it is looking for and no interlayer to hide these parts. That's why I added interlayers. It might not be necessary if the thickness of your part is sufficient to avoid being within the +-10% scaling.