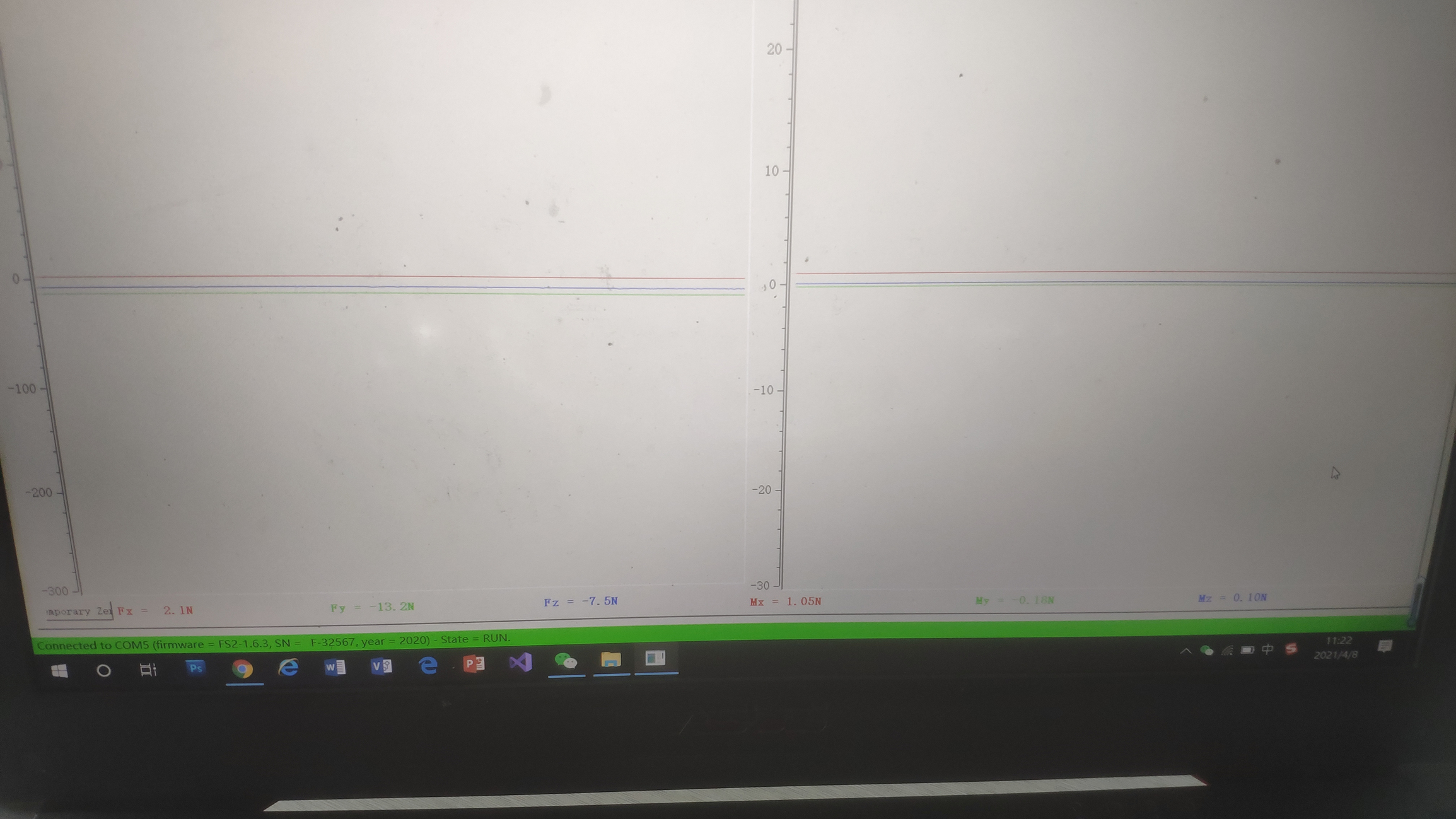
When I used FT300,I met some issues about the datas.Before use it, I have done the calibration and zero the data.But when I control a joint vertically downwards, the force data obtained has components in other directions.What could be the reason that caused this result.
@class From what I understand, you:Made the zero of the sensor with the sensor installed like shown on the pictureMove the robot vertical downwardIdentified an offset of -9.7N on Z axisIt is possible internal deformation of the force sensor remain after some motion and cause an offset. This is usually an offset of about 3N. What is the weight of the object ?What is the acceleration of the robot when you do the vertical motion ?
Hi,The weight is 916g and the robot is Stationary state.Before I done calibration and zero the sensor, I didn't install the object. When I finish calibration and zero the sensor, I install the object and the robot is stationary state.The sensor has a component of force in a direction where no force should appear.
@class The zero of the sensor should be done with the object on the robot. Each time you mount something on the sensor, this will induce constrains on the sensor and offset readings.With such offset weight, I would also recommend to work with torque rather than force. Offset weight can induce parasitic force.


 class
class
 class
class
 bcastets
bcastets

When I used FT300,I met some issues about the datas.Before use it, I have done the calibration and zero the data.But when I control a joint vertically downwards, the force data obtained has components in other directions.What could be the reason that caused this result.