bcastets
bcastets
The activation of the gripper should not impact on the postionning.
Positioning problem may occur if you have a defective joint.
Also double check that the TCP selected is correct. If you have several TCP and you use current TCP in your moveJ and moveL, I would recommand to use the set command to define which TCP you are using.
I noticed that the robot keep memory of the last set TCP.
For example if robot default TCP is TCP1 and the last move is done with TCP2. When you restart the program the first move of the program with be done with TCP2 and not TCP1.

The Dof Community was shut down in June 2023. This is a read-only archive.
If you have questions about Robotiq products please reach our support team.
If you have questions about Robotiq products please reach our support team.
I came into this problem this morning. The robot was acting if it had been moved a bit (1/16” to 1/8” or so) in the X and the Y. This machine had been running perfect for almost a year and it was running fine when I left yesterday.
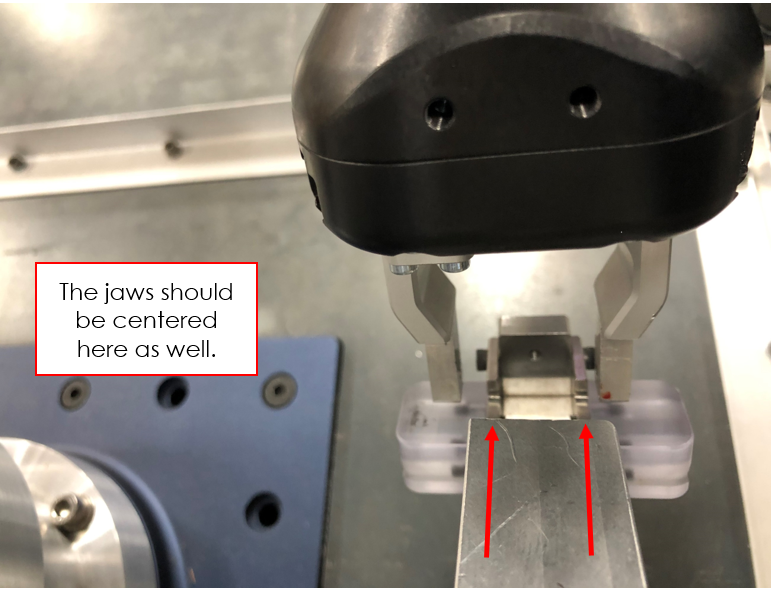
One thing I initially noticed was that the jaws on the robotique gripper were off center a bit. I re-activated them and that problem went away. I’ve never seen either of these problems before. Is there any chance that the gripper could somehow be affecting this? I’m completely out of ideas as to what happened. I loaded a backup program and it did the same thing.
As you can see from the photos the jaws are not centered as they should be.
All of the fixturing is pinned and tightly in place.
UR3e Version 5.3.1.64192
Any help would be greatly appreciated. Thanks.