
 Etienne_Samson
Etienne_Samson
@vic i opened a support ticket and we will contact you. When you tried the setup with the Robotiq User Interface, how were you configured? Did you have power to the gripper? If yes, LED should be red. Then when you connect the RS-485 to USB converter to your computer the Robotiq User Interface should display the COM port, if it's not there contact us. If it is there, please try to reset the Gripper (see manual).
Best,
 vic
vic



 thanks Etienne_Samson.
thanks Etienne_Samson.
the gripper led dont turn on.
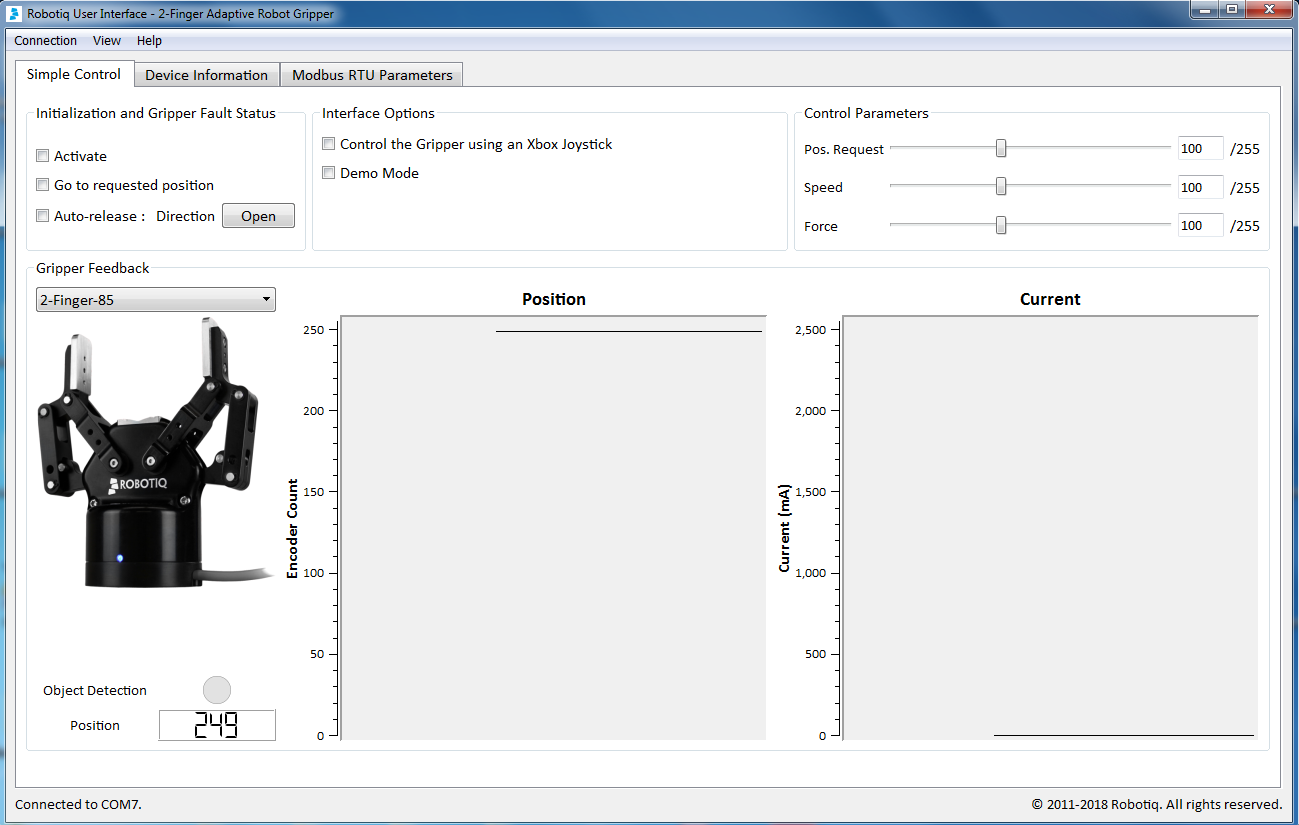
when i used the user interface with gripper + controller Ethernet ip is detected but it is not operated, i attach a picture.
when i used the user interface with gripper + converter rs485 to usb, is it not detected.
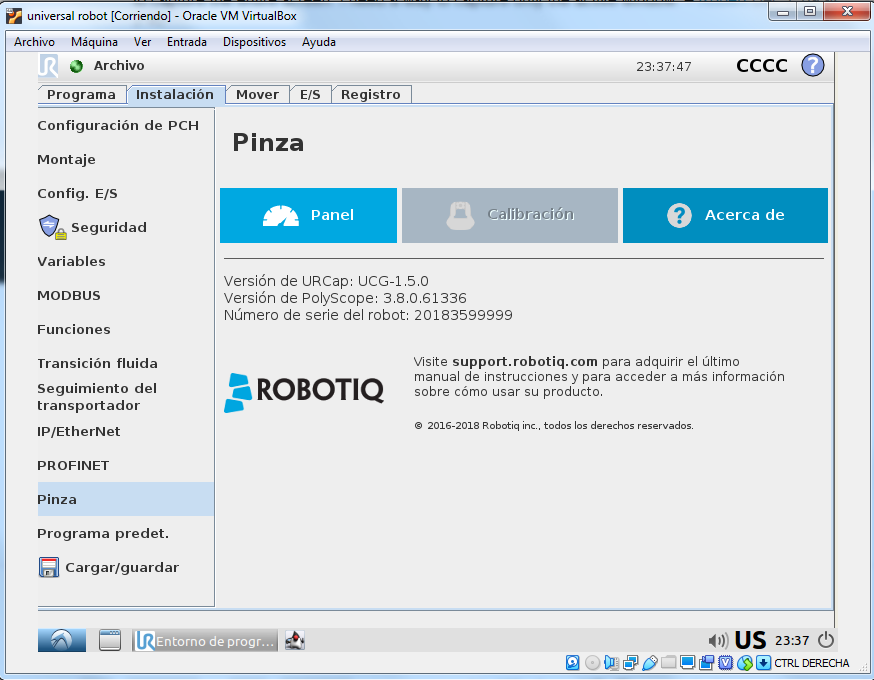
when i used virtualbox + ursim + urcap + controller ethernet ip device is not detected, i attach picture.
when i used virtualbox + ursim + urcap + converter rs485 to usb, device is not detected.
 David_Levasseur
David_Levasseur
@vic, thanks for the pictures. Connect the green wire to pin 7. As for using the gripper in URSim, follow the attached procedure.
vic

 hello David_Levasseur.
hello David_Levasseur.
i connected the Green wire to pin 7 and followed the instructions like attach file, the gripper dont fuction.
vic
 hello David_Levasseur.
hello David_Levasseur.
now i checked the wires grippers and one pin (vcc) is wrong.
i proved with other wire and the gripper functioned in robotiq user interface with rs485-usb, but dont work in:
robotiq user interface + controller Ethernet ip + wire Ethernet
robotiq user interface + controller Ethernet ip + wire usb
virtual machine + ursim + urcap + rs485-usb
virtual machine + ursim + urcap + controller Ethernet ip + wire Ethernet
virtual machine + ursim + urcap + controller Ethernet ip + wire usb
hello.
i have 3 hand-e grippers, 2 with controller Ethernet ip and 1 with rs485-usb converter to ur5 robot direct conection.