 David_Gariepy
David_Gariepy
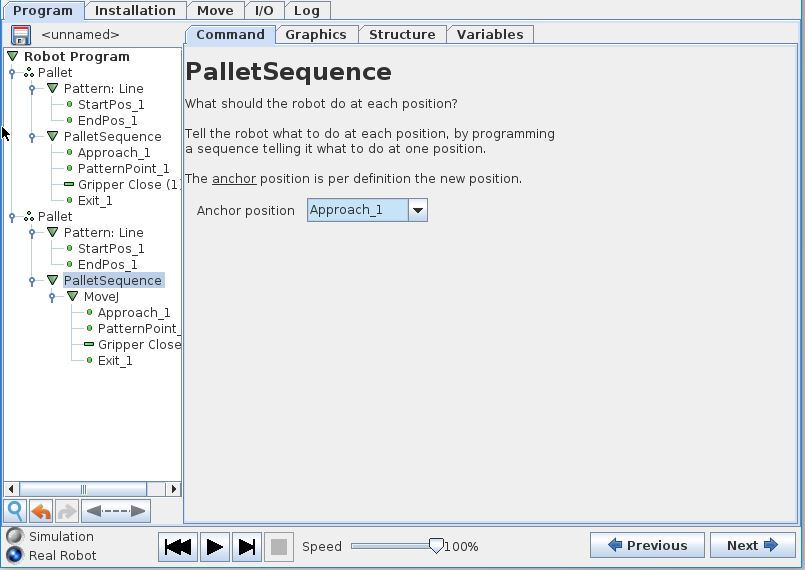
Not sure if this is what you are looking for but you can change from MoveJ to MoveL from the command menu
Use shared parameter mean it will use the speed and acceleration defined in the MoveL or MoveJ command. But you can define the speed and acceleration for each point if you want.

The Dof Community was shut down in June 2023. This is a read-only archive.
If you have questions about Robotiq products please reach our support team.
If you have questions about Robotiq products please reach our support team.
 Kaan
Kaan
i seem to have not been able to get robot arm move from it's pick up point to go to it's first drop off point on the pallet linearly, since it has to move through
between two conveyorbelts and stack the buckets in a line form it is important to have him MoveL instead MoveJ , because it keeps bumping into conveyorbelts
My question is how to make him go MoveL, in other words go straight line between two points for palletising.it says use shared parameters , what is that mean?
thanks.