 lawrence
lawrence
@Sebastien Please check this!
https://youtu.be/KIwqvd7NhnE
 Sebastien
Sebastien
@lawrence
really nice!
 Sebastien
Sebastien
@lawrence
really nice!
Hi pros,
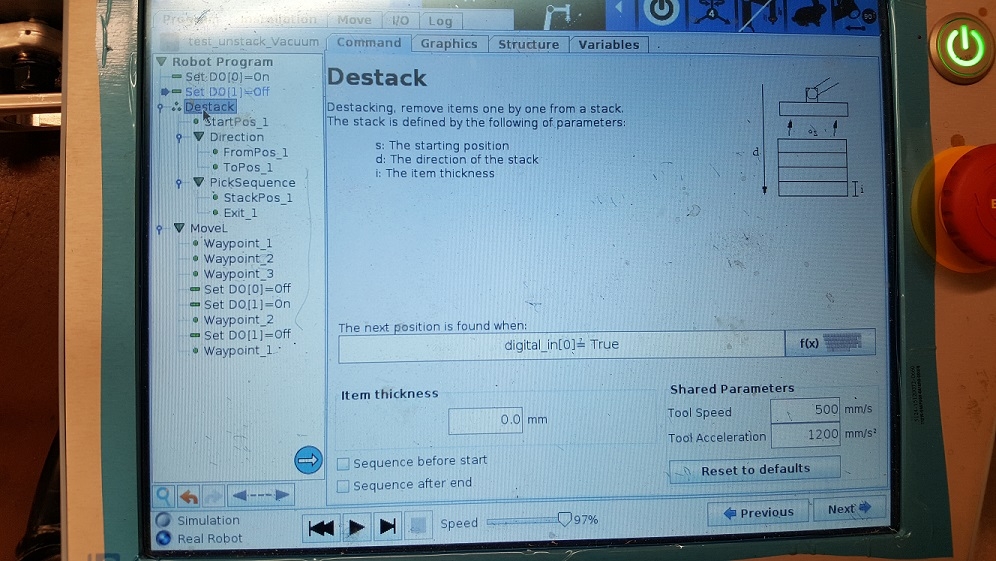
we recently just tested the SEEK function available on the UR. This was for a client that has piles of flat parts that are picked up using a suction cup. The way we did this with the seek tool is as follows.
1-We hooked up the digital signal of the vacuum cup to a Digital input of the robot. That signal would tell the robot that a part has been picked as it is moving down towards the pile.
2-In the Destack setup of the SEEK function in the UR, we entered the proper Digital Input to monitor (our vacuum signal that would let the robot know when an object has been grasps by the vacuum cup).
3-We would then easily do the rest of the setup for the destack and programmed the drop sequence.
This SEEK tool has been really nice. The application you see in the video below took us at most 10min to program.
Anyone using this but with the seek condition done using the signal from the Robotiq FT sensor? Any comments, thoughts or example would be nice!
https://youtu.be/sqkwoOtNs7o