 matthewd92
matthewd92
So we do a lot of development with our TCP device from the simulator and getting a reliable connection from the simulator back to either the computer or our to the network can be an interesting challenge at first. What system are you using for the simulator? Are you running in VirtualBox?
In VirtualBox if you just want to get to the host computer you can setup a host only connection in the network settings. Then you would need to open the terminal and get the IP address that the DHCP server assigned to the robot. Mine is usually 192.168.56.101 with my computer being 192.168.56.1 using the settings below Virtual Box (Access from preferences on Mac, not sure about Windows)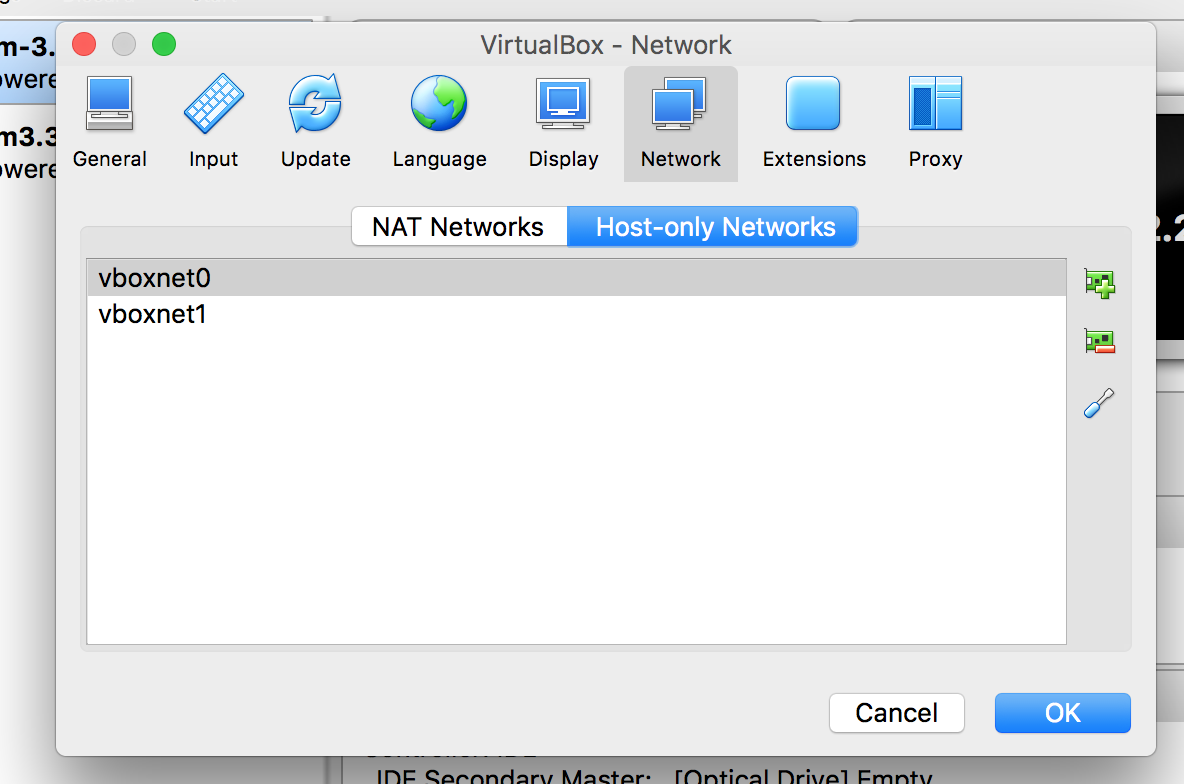
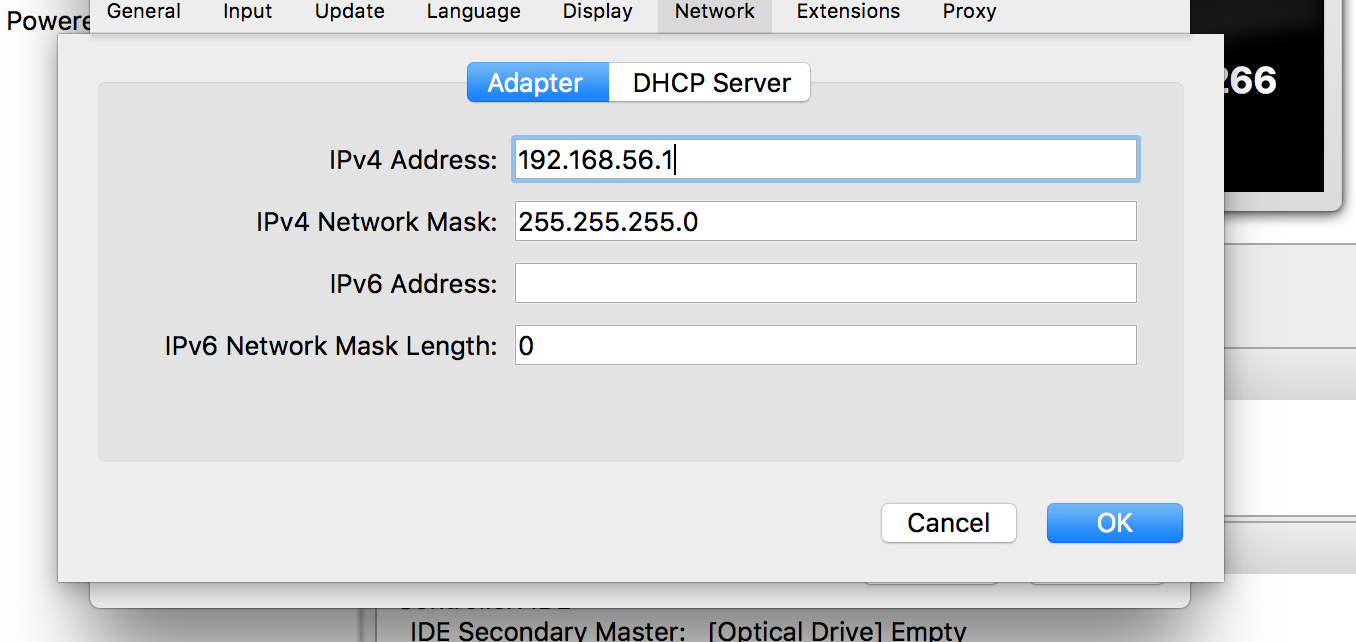
And then on the actual machine settings you would choose host only and the adapter that you set-up
If I want to be able to get to the robot or to another device on the network then I will usually use a bridged adapter that bridges the internet connection from my machine to the virtual machine. Like I said we have used this to connect to robots from the simulator or to physical devices and the host computer for running TCP type connections.

The Dof Community was shut down in June 2023. This is a read-only archive.
If you have questions about Robotiq products please reach our support team.
If you have questions about Robotiq products please reach our support team.
 mbaril
mbaril

 Stefan_Stubgaard
Stefan_Stubgaard
Has anyone been capable of establishing an Ethernet/IP connection with the virtual robot of URSim? I have a configuration where my PC is the Ethernet/IP Scanner.
I'm using the following parameters to connect to the robot:
Robot input size = 480
Robot output size = 224
Consuming connection point = 112
Producing connection point = 100
Configuration connection instance = 1
I was able to connect to a real UR5 using these configs, but It'll be great if I could use URSim for my developments...
Thanks for helping!