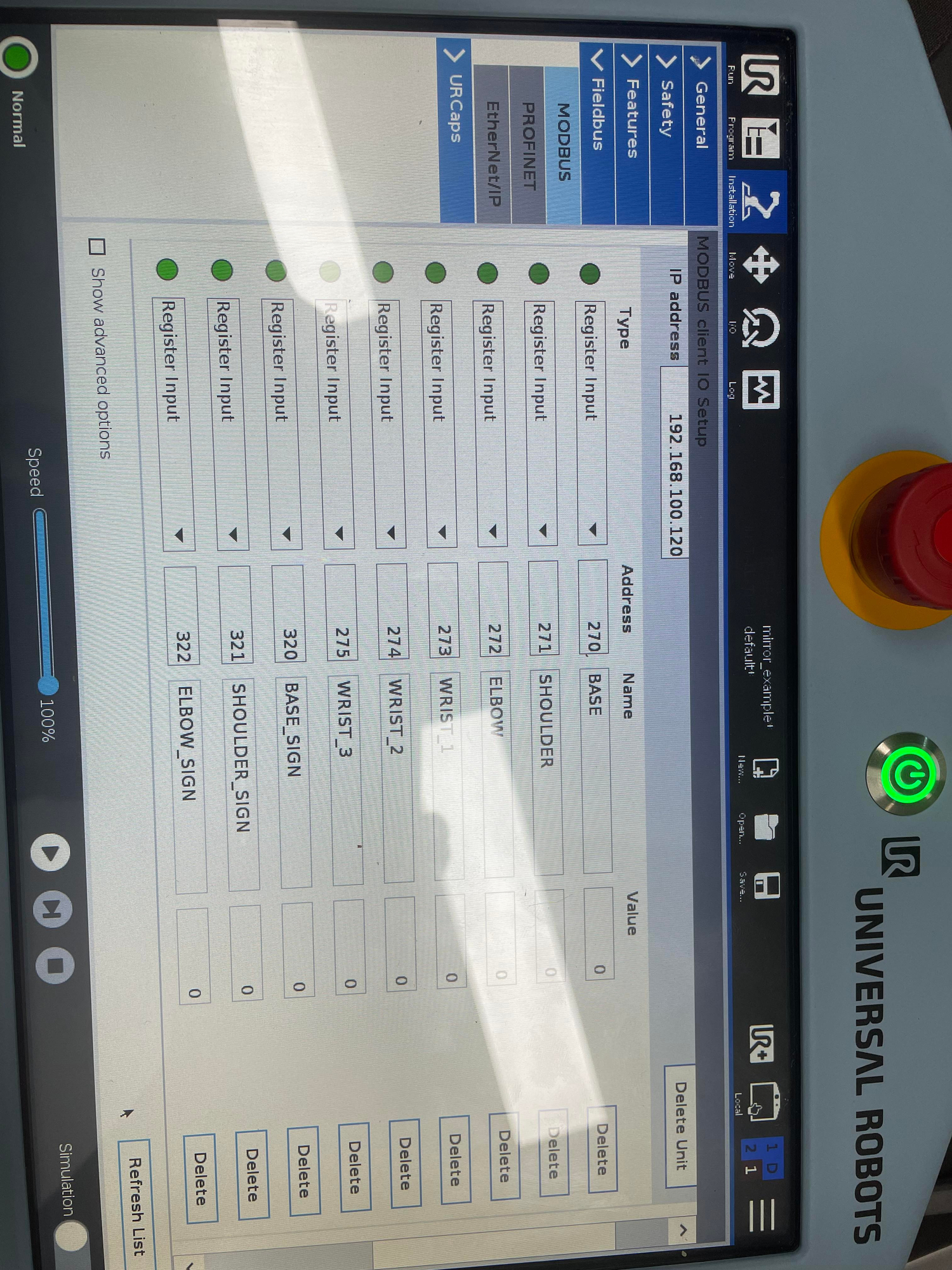
Hi guys ! I am trying to do a mirroring between my two UR robots by connecting each other by Modbus Tcp. How do I set up a register address in order to active the HandE grippers?I am new to this :(
Hande is not controller via modbus TCP. You can eventually set a custom modbus TCP register on the robot and add a thread in the program to activate the gripper is if have a specific value in the modbus TCP register.
 Junghyun
Junghyun
 Junghyun
Junghyun
 bcastets
bcastets
Hi guys ! I am trying to do a mirroring between my two UR robots by connecting each other by Modbus Tcp.
How do I set up a register address in order to active the HandE grippers?
I am new to this :(