
 michael_f
michael_f
Hi,
I need to obtain the position and orientation of an irregular object using the Camera Locate node.
I see that object_location is a variable with the pose structure (x, y, z, x rotation, y rotation, z rotation).
1 - The rotational components are not quiet clear and I would be glad if someone can explain it.
Eg: the x - rotation: Is this the rotation between the object's x axis and robot base's x axis about the robot base's Z axis ?
2 - is this frame and axis correct ?

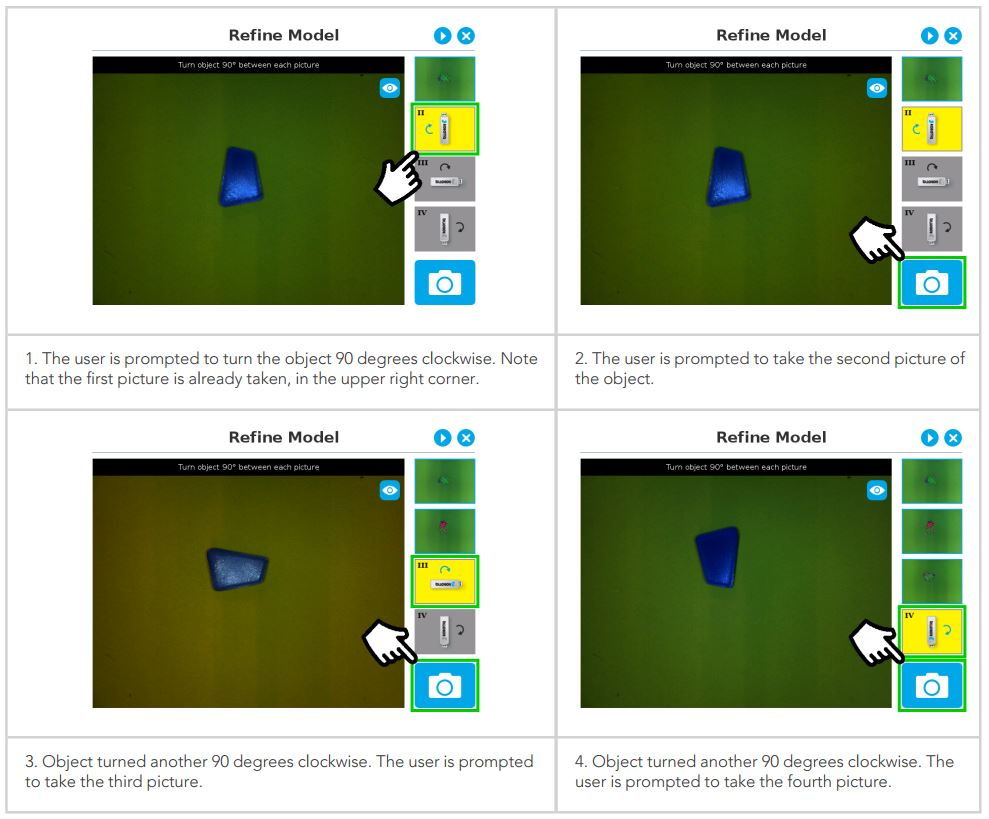
3 - During the refine model stage of object teaching, how accurately must the irregular object be rotated by 90deg ? any tolerance ? or do I need to use a L square such that its perfectly 90 during each turn?
4 - In the Confugure Model and Set Position phase. what should the object's orientation be while setting this position ? Should it be specifically in one of the Refine Model sequences ( 1 to 4) orientations? Will the object's orientation be computed using this as a reference henceforth ?

Regards,
Michael
 bcastets
bcastets