
I got feedback that a software license would be required to compile the Karel routine.
 bcastets
bcastets
I am wondering about the electrical connection at the wrist of the robot. CRX manual illustration of the connector is difficult to understand.
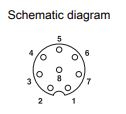
Here below is eSerie serial coupling pinout: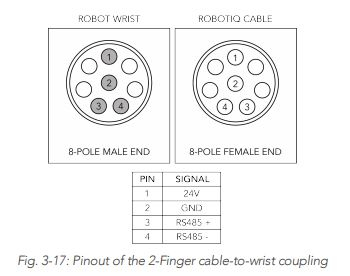
Here below is CRX EE interface pinout:
Connector datasheet:
https://ca-en.alliedelec.com/m/d/741df2a90ab8d03ba5c3068f60cf8f66.pdf


 a_machinist
a_machinist
 Yoeri_Guliker
Yoeri_Guliker
Have you ever integrated Robotiq gripper on Fanuc CRX ?
I would like to share with you some work done by Fanuc US team.
They made an integration using the Karel routine attached to this post.
Here below are the comments of the developer who made this integration:
Verify these in the System Variables:
* You need to update $TLIF to get voltage to the EOAT. Set $TLIF.$POWER_VOLT[1] = 2 for 24V supply. Power cycle to apply it.
* Set $TLIF.$BAUD_RATE to 3
* Set $TLIF.$DO_MODE[1] and [2] = 0
* Power cycle.
The connection is made using modbus RTU at the wrist.
The bolt pattern of Fanuc CRX is same as UR:
Our eSerie serial coupling (GRP-ES-CPL-062) can be used to make the connection at the wrist. Connector and pinout match Fanuc CRX.