 bcastets
bcastets
Here is the program and a PDF version of the detection sheet.

The Dof Community was shut down in June 2023. This is a read-only archive.
If you have questions about Robotiq products please reach our support team.
If you have questions about Robotiq products please reach our support team.
I would like to share with you a solution to detect an pick an unlimited number of objects with the wrist camera with only 2 camlocates and no need to teach a model for each objects.
This solution is easy to maintain because there is no need to reteach object model if you change parts. It is also a light program with only 2 camlocate. You could even use only one camlocate to make it works.
https://youtu.be/8qnvAHRM7Gw
How does it work ?
- The camera detect the position of a detection sheet where are printed picking position illustrated by cercles (It is possible to print up to 25 positions).
![]()
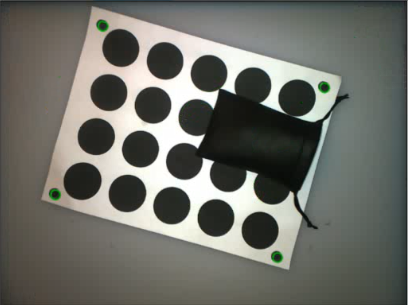
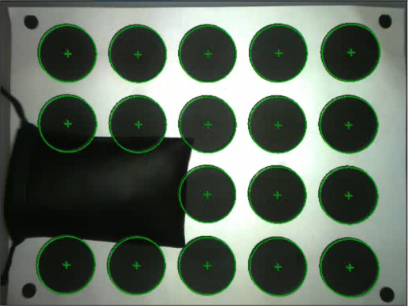
- The camera search picking cercles on the detection sheet. If one picking cercle is not detected, the robot consider that an object is placed above the picking cercle and dive to pick the object.
Here are the steps of the program:A script function is used to check if a given point is near one of the points of a given point list.