haneulines
haneulines
Hello,
In our company, we want to use a Cobot for a special application : glue application in the corners of a circular face ( alike this video https://www.youtube.com/watch?v=jWhsL74CL9c)
I want the robot to add an angle α
at its movements in order to reach the corners all over the circular path like this :

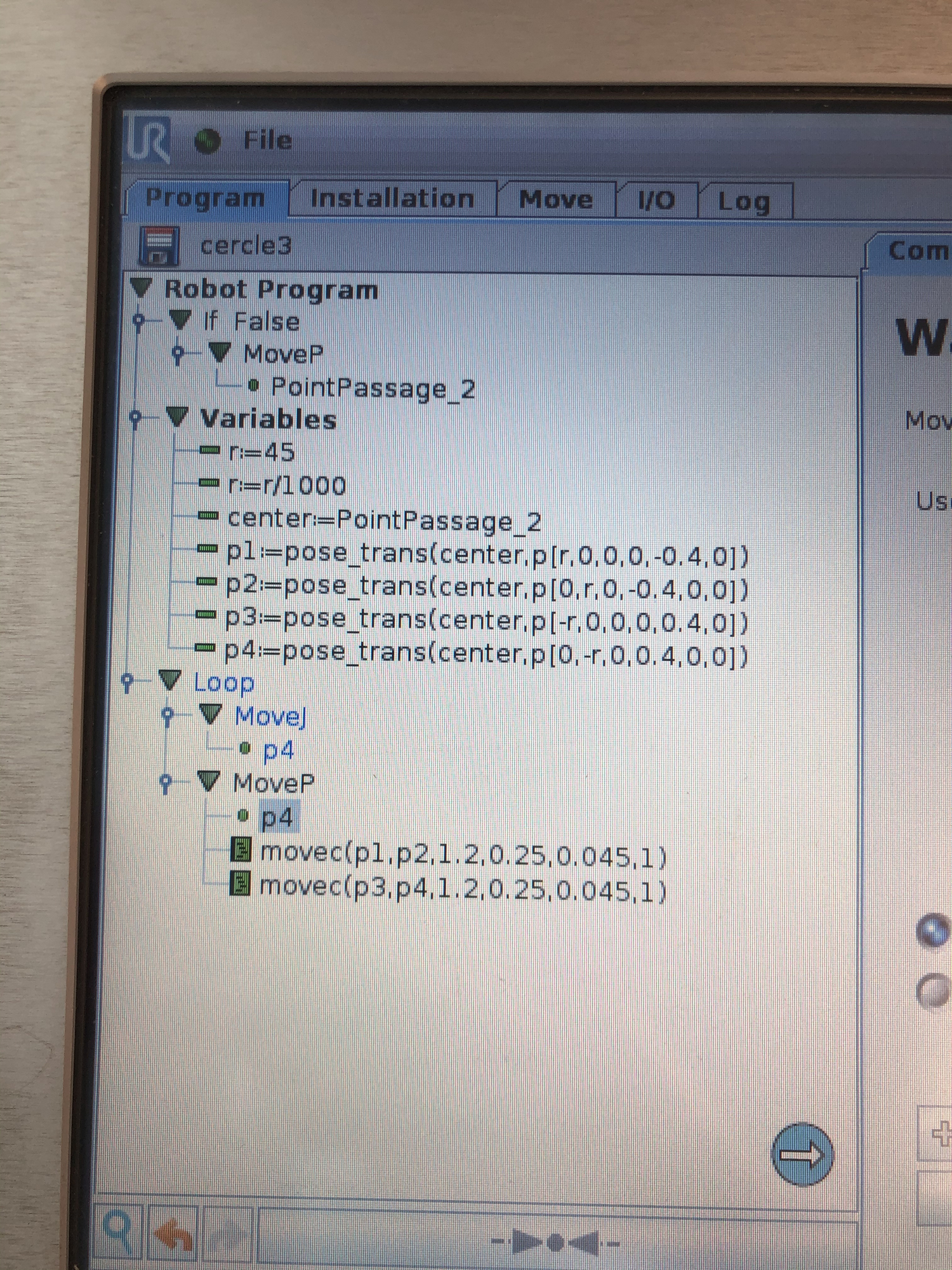
Here is the program for having a simple circular path (without any angle) :

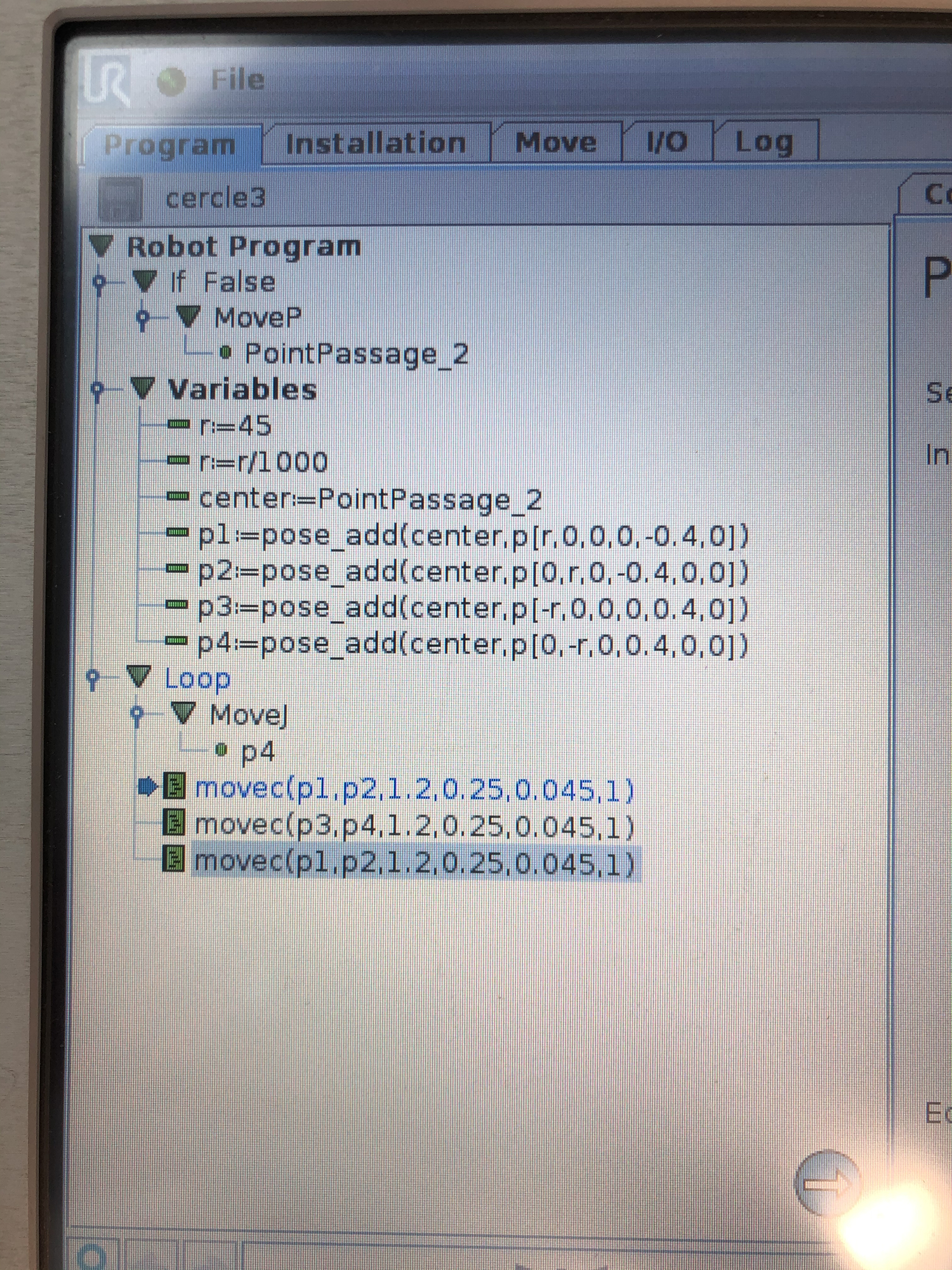
In order to have the angle all over the path I changed the program : I added +/-0.2 radian at RX or RY for p1, p2, p3 and p4 :
Example : p1:=pose_add(center,p[r,0,0,0.2,0,0])
But this is what I got on a video (Watch FullSizeRender.MOV)
The Robot is not tilted constantly... Should I add more MoveP points ?
 matthewd92
matthewd92
 bcastets
bcastets

 @"Loïc" @matthewd92
@"Loïc" @matthewd92