 bcastets
bcastets
@matthewd92
Do you know an easier way to make relative move with fixed orientation ? My method works but it requires a lot of script for each points.

The Dof Community was shut down in June 2023. This is a read-only archive.
If you have questions about Robotiq products please reach our support team.
If you have questions about Robotiq products please reach our support team.
The Robotiq wrist camera is commonly use to detect the position of an object and plan robot motion according to the detected position to pick it.
It also possible to plan motion relative to object position to apply glue on the part for example.
Basic relative UR move calculate relative position (X,Y,Z) and orientation (Rx,Ry,Rz) and move the robot to it. However if you are doing a glue dispensing application for example you may want to make relation move while keeping a fixed orientation to avoid twisting the tubes and cable attached to the arm.
This article present a way to move the robot relative to the object position while keep same tool orientation. The object detected is a printed profil of a transmission case.
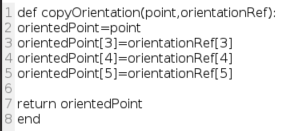
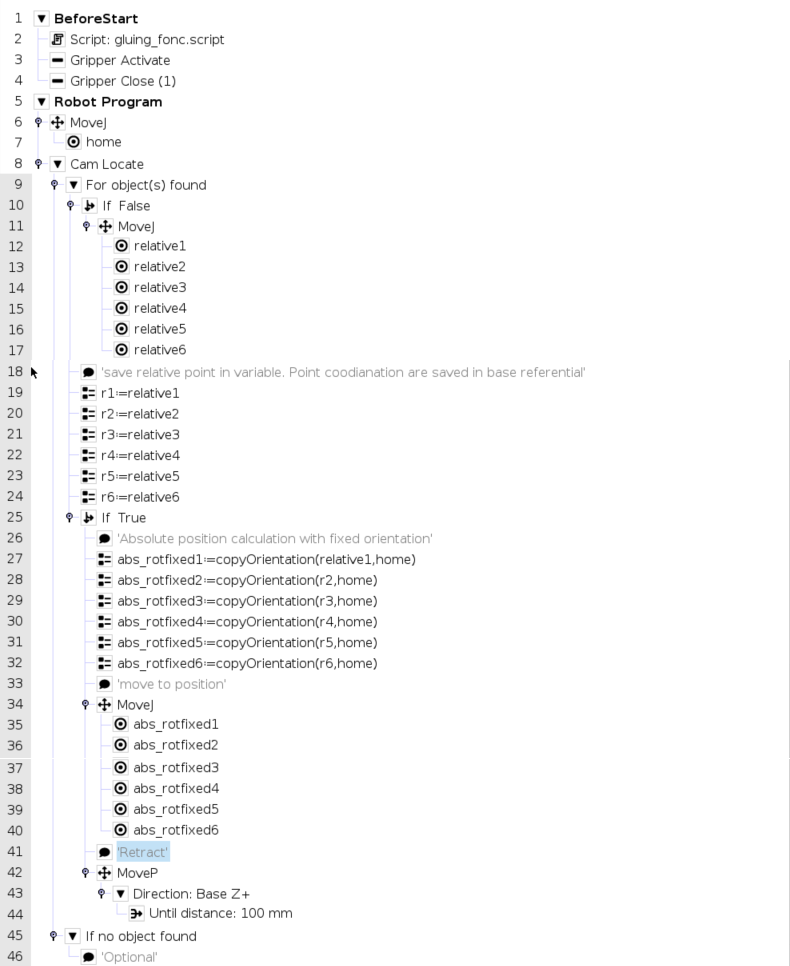
The programme make a copy of relative waypoints and apply the orientation of a reference waypoint (here "home").
Here below is the programme and script: