
So here is my conclusion: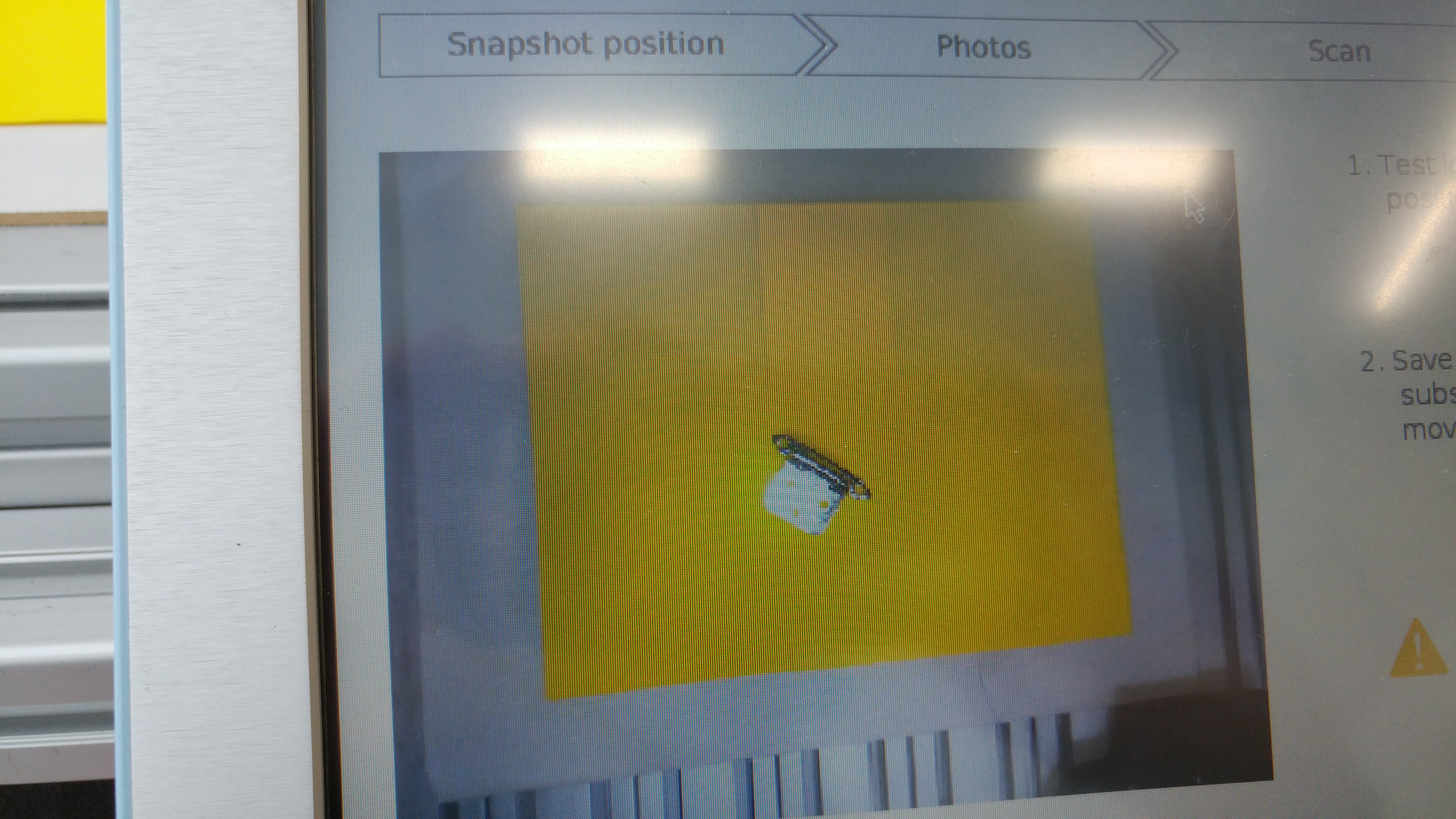
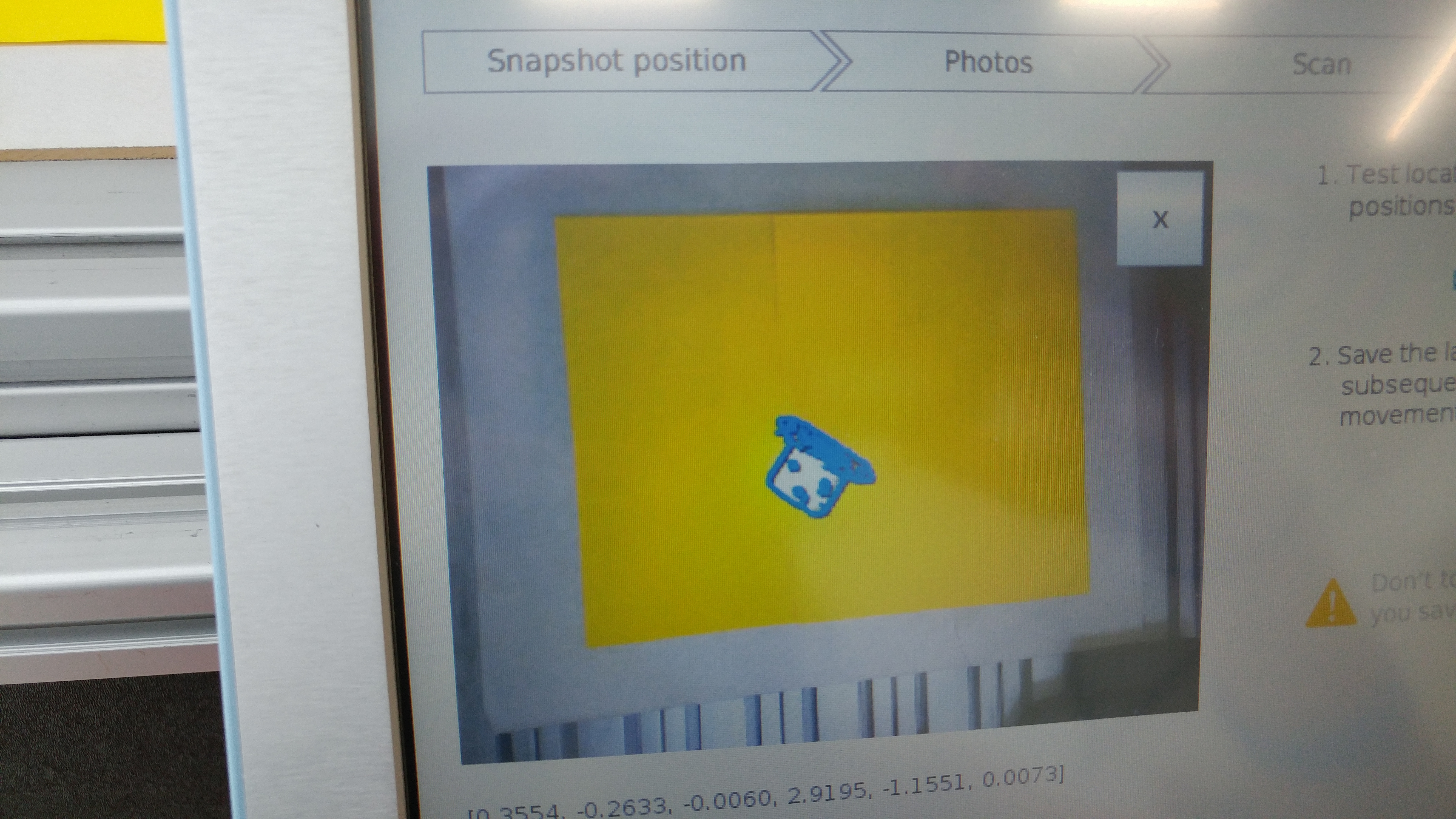
By teaching a shiny part, the light reflection the camera sees on the part is defined as a feature. Therefore, the software of the camera tries to locate the parts with those "false" features. If the part has the same flash on it, the software can recognize it, but if it differs or even if you choose a similar part but painted (black hinge), it won't recognize it.
The opposite is also true. Teaching the Camera with a painted part can also cause the software to not detect the shiny part with more features due to the light reflection.
As a robotic user using vision, did you ever get some challenges with shiny objects?
 Catherine_Bernier
Catherine_Bernier
I want to invite @Vincent_Paquin and @Nicolas_Lauzier to share their expertise on this matter.
 BeachChE
BeachChE
 tylermartin
tylermartin
 Ryan_Weaver
Ryan_Weaver
 Alexandre_Pare
Alexandre_Pare
Yes, from experience this can be quite a challenge. Using Infrared lighting or Dome Diffuse lighting helped me make some shinny parts work with vision in past projects. Here are two lighting guides that I like to refer to!
8 tips for optimal machine vision lighting
A practical guide to machine vision lighting
If anyone have some hardware in hand and can try some of these techniques on shinny parts, it would be nice to see picture results!
 audreybg
audreybg
I agree with @Ryan_Weaver that the use of a backlight would probably be the easiest solution if it can be used in the application. Infrared lighting is another great option. A book that has helped me a lot in the past to manage all kinds of surface appearances (shinny objects, but also glass/texture/etc): Light: science & magic. Since it explains the reflections, family of angles, etc, it will help you narrow down the selection of lights you should try out and should save you some time. A great book to add to your library :smile:
 Nicolas_Lauzier
Nicolas_Lauzier
 Grady_Turner
Grady_Turner
When using vision in robotic applications, the surface finish can be a challenge. More than often, we hear that a too shiny surface will cause the camera to not detect the part or to see inaccurate shapes.

Our Robotiq Camera isn't an exception, but there are ways to work around this issue.
For example, using external lighting and making sure that what is recognized is not related to a flash can help you in locating the shiny part you want.
We plan on doing a video showing how the surface finish of a part can affect the part recognition.
Did you ever had challenges with surface finish of a part when using vision systems?
Please share your experiences!