
 bcastets
bcastets
There is a higher possible level of communication for ModbusRTU device. TM Flow integrate a Modbus RTU communication system.
Here below is an example of program using this system to retrieve finger position.
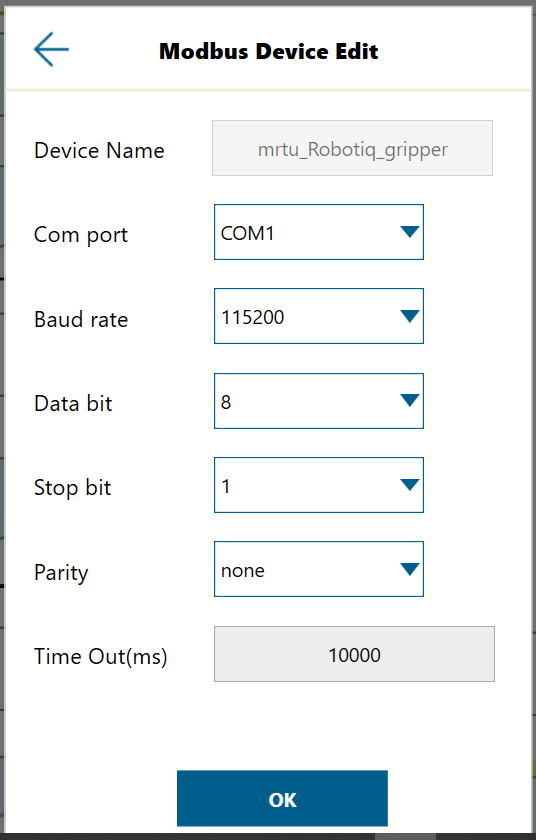
First it is necessary to define the Modbus RTU device using the right side panel.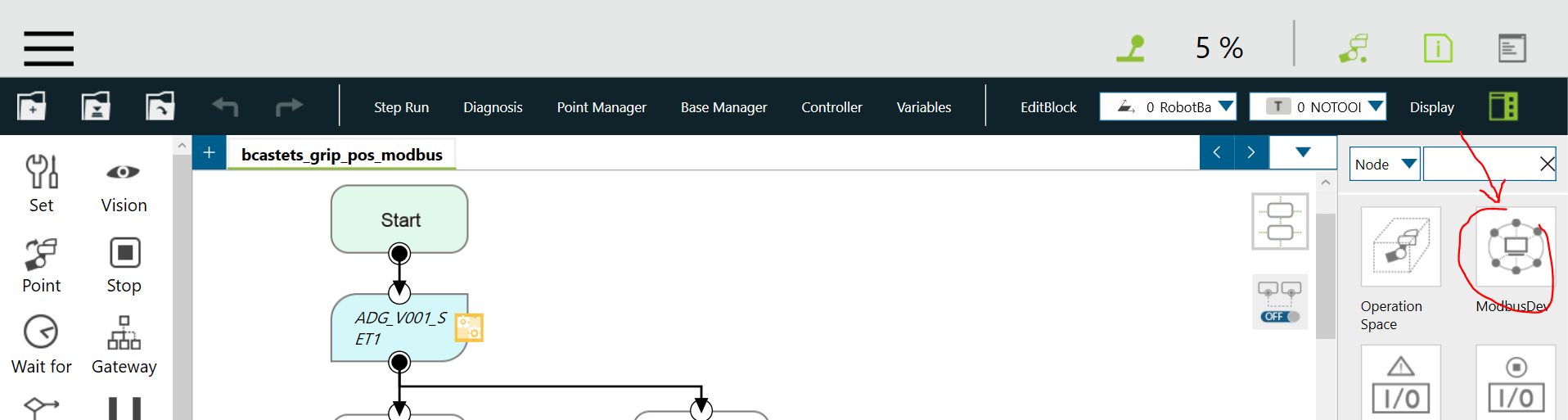
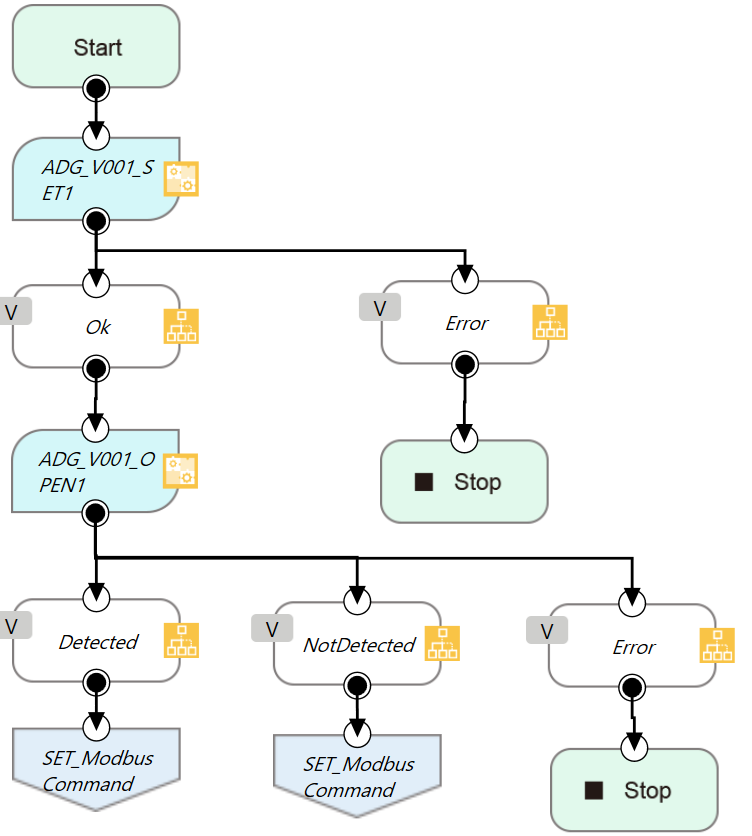
Here below is the program.
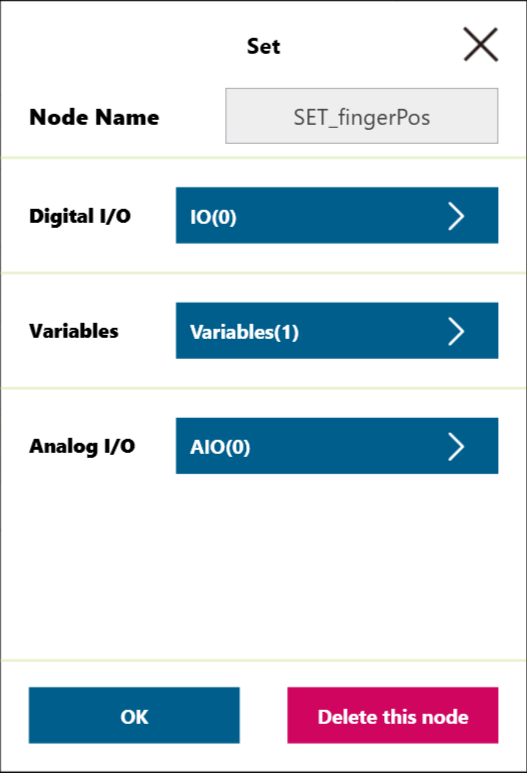
- In the first column, the result of Modbus RTU request made with TM Modbus RTU system is store in a variable. This request reads 3 registers from address 2000. This is same as previous program.
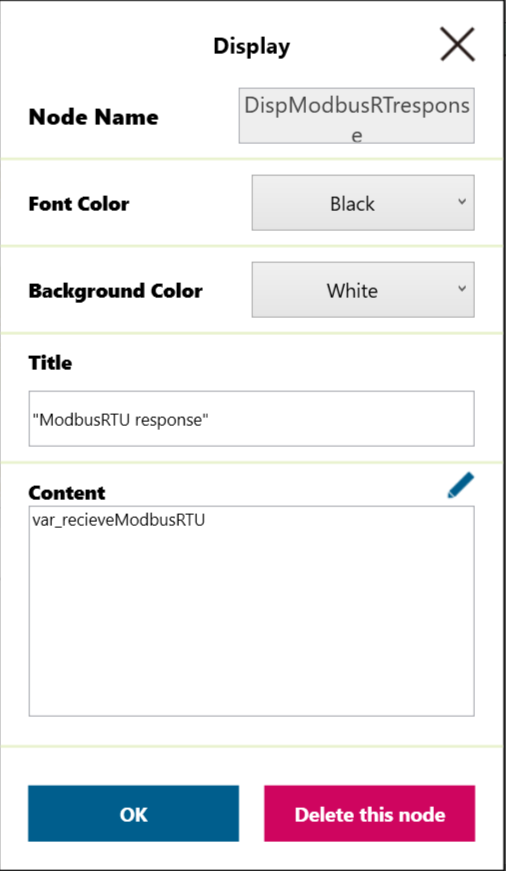
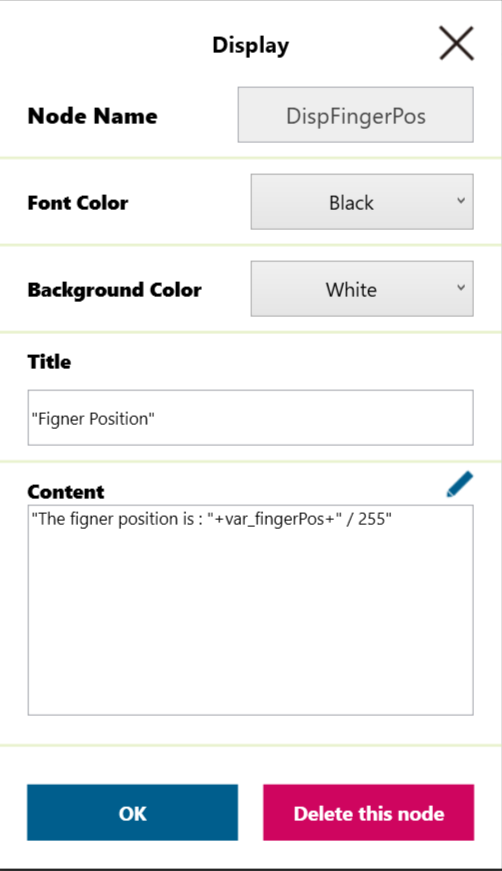
- In the second column, the finger position is extracted from the Modbus RTU response and displayed on the screen.
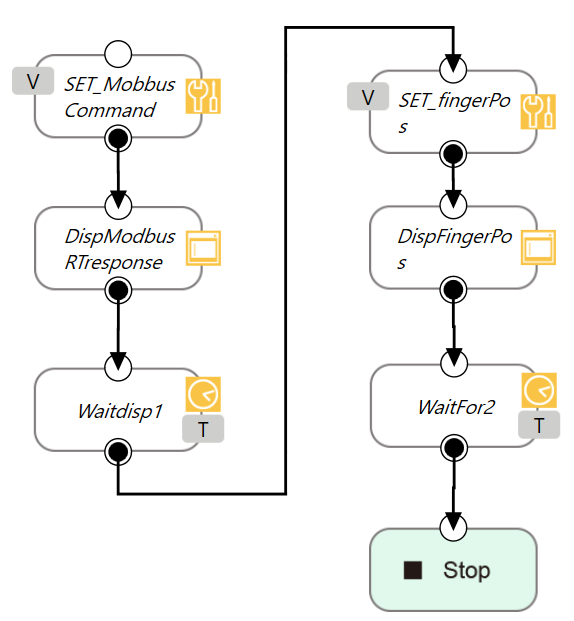
It is quite short and easy to implement.
The program is attached to this post.
TM offers plenty of possibility to make advanced communication with Robotiq products with are native ModbusRTU devices.



 davzing
davzing
You may be interesting in getting the finger position of 2F or Hand-e gripper on TM robot.
At the time of the post the TM component we provide does not include a function to retrieve finger position. I would like to share with you solutions to get this information.
The first solution use a low level serial communication system called "TmComm". It is not dedicated to ModbusRTU. This system allow to send and receive any kind of data from the serial ports of TM robot.
The program start with a gripper activation and a gripper open. This is just to position the gripper at a requested position before accessing the current position of the gripper.
After the gripper finger action is complete a series of low level operation is done using "TmComm" to get finger position.
Check gripper documentation on Robotiq support page for more details about gripper register and ModbusRTU control.
The program is attached to this post.