
 markus_rothtechnik
markus_rothtechnik
Hi there
okay i'll be the first and post a challenge i am trying to solve. since i am a newbie to robotics i don't have years of experience to draw from :-)
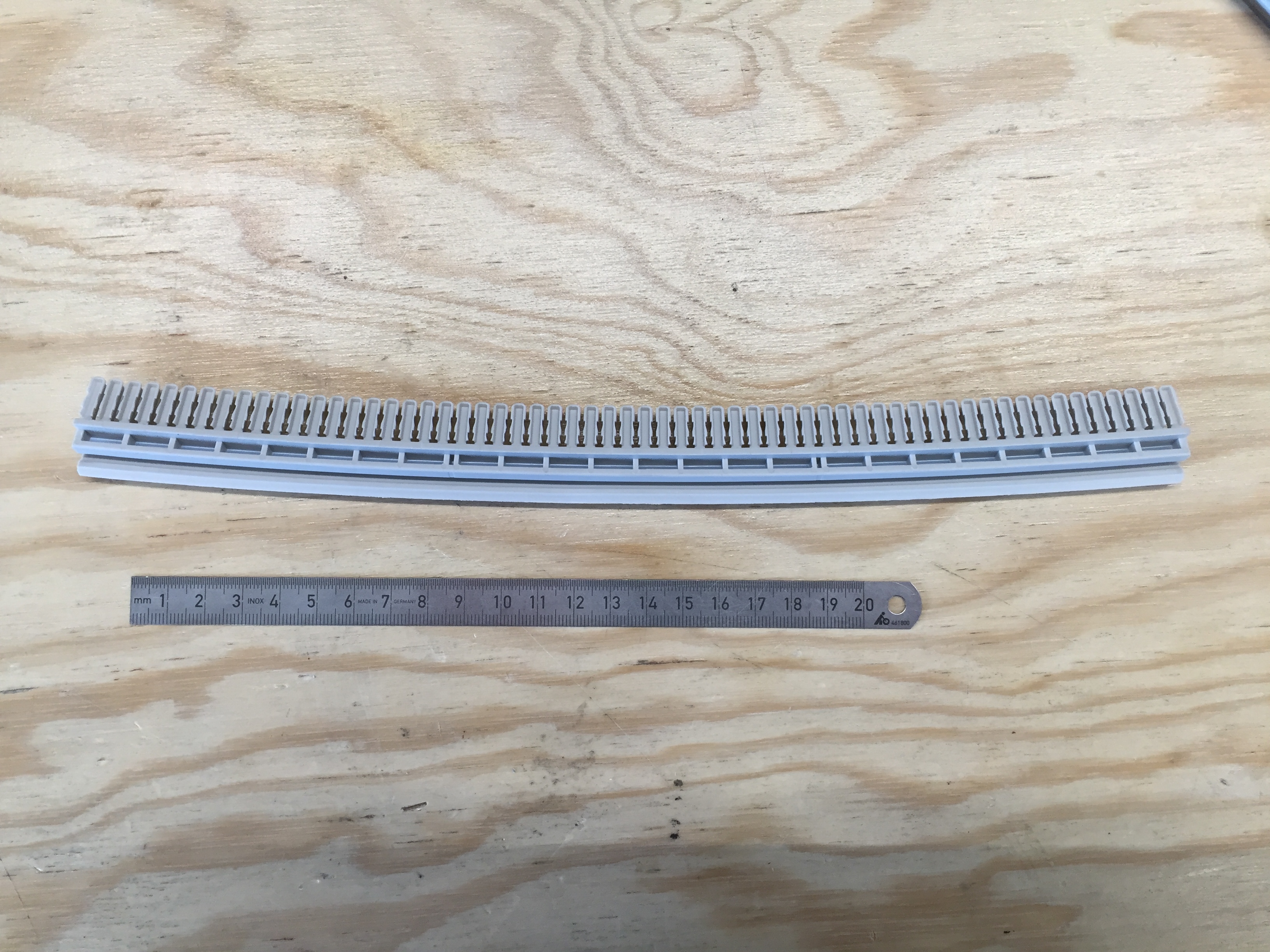
a potential customer asked me to automate the task of clipping these plastic strips onto various aluminum profiles. they have a snap on shape and at the moment they do this by hand. thousands per day.
the aluminum profiles vary in width, length and shape. the region where the plastic strip snaps on is of course always the same. some profiles need these strips on one side only, some on both.
so far i have concluded:
1. handling these plastic strips is not feasible when they are shipped "unordered" and mixed in a box.
2. so first i would need to make sure they come ordered. see picture where they are layered. i talked to the Injection Moulder and he might be willing to set a UR10 ontop of his IMM. the idea is to stack the parts into boxes where they could not move. the boxes themselfes would be stackable too. this way alot of storage volume would be saved and also transports too. Problem: the parts deform when they cool. i don't know if they are completely done deforming when they arrive in the box or only 50%.
i don't know if this will me a big problem causing jamming etc.
3. at the assembly company i would install a UR10 as well, and the idea is that on one side there is a pallet or similar with stacks of aluminum profiles, and on the other side there are the boxes with plastic strips. the robot picks a profile and places it in a "vice", some mechanism that will hold the aluminum profile in place while the robot clips on the plastic strips.
4. the robot then picks a plastic strip (or two) and the robot tool itself has a clamping mechanism that will perform the clipping onto the profile.
unsolved tasks:
A) the robot needs to know how many clips he needs to put on a profile, depending on the length of the profile. numbers range from 1 to about 4 or 5, so lengths of profiles are 200mm to 1200mm. ideas are: measuring system at "vice", vision system, touch-probing the sides to determine length.
B) The robot needs to know if he needs to clip only one side of the profile or both. easiest would be to make two stacking places, or two seperate programs. other thoughts are with selector switches or sensors / markers at the stacks. i tend to make things simple and easy, so at the moment i lean towards two stacking places. this will result in low autonomy times since stacks cannot be very high. so no running overnight.
C) additionally, once the plastic strips are clipped onto the profile, the ends stick out since the profile lengths vary but the plastic strips are of course always the same. they need to be cut. it would be great to do this with the robot too. my idea is to integrate a pneumatic clipper into the robot tool and seek the end of the profile (or calculate it when measuring system on vice is implement it).
5. Robot then places finished profile on a seperat pallet.
i don't know if all pictures are visible, i added 4 but i only see two.
any ideas, thoughts, comments are welcome :-)
cheers,
markus


 mathbelanger
mathbelanger
 Alexandre_Pare
Alexandre_Pare
 Nicolas_Hardy
Nicolas_Hardy
 gerenga
gerenga
This discussion was created from comments split from: Applications, Integration or Programming : Where should I ask my question?.