 matthewd92
matthewd92
Do you have your TCP set to the end of the pin? Is the bore always facing the same way, i.e., once you find the opening you could turn the part and slide it in the same way each time?

The Dof Community was shut down in June 2023. This is a read-only archive.
If you have questions about Robotiq products please reach our support team.
If you have questions about Robotiq products please reach our support team.
 Flomz
Flomz
Hello ! Need help please...
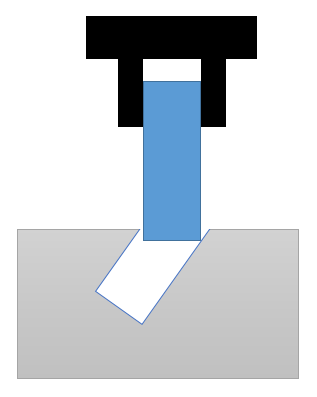
In my application I want to insert a sort of pin in a bore, but this bore is in angle with the top plane (10°) and also in angle with the right plane (20°). First I have used the function called "spiral" to find the bore and when the robot find it, the pin is inserted until the robot find a contact inside.
So my problematic is how can I do to fix the position of the end of my pin, and rotate slowly around this fixed point (like the spiral function incremented gradually) to enter in ? Or is there other possibilities to enter this pin on the right way ?
Thanks a lot !