
 Nicholas_Francoeur
Nicholas_Francoeur
Hi @agiakos and welcome to this community!
How are you setup to receive signals with Labview? What URCap version are you using with your gripper and FT Sensor?
Can you explain more what time and distance you are looking for in your application?
 [Deleted User]
[Deleted User]
Hi @agiakos
Yes, you can communicate with Labview to the Robot controller and FT Sensor using Ethernet to retrieve or send datas. Information can be find here for the UR: https://www.universal-robots.com/how-tos-and-faqs/how-to/ur-how-tos/ethernet-socket-communication-via-urscript-15678/
To communicate with the FT sensor force via Ethernet you can use the Modbus RTU Serial communication or can access the Data stream on TCP port 63351 via the UR Controller: https://robotiq.com/support/ft-300-force-torque-sensor/downloads-instruction-manual (Ref. Section 4.5: Serial Communication)
You can import the TCP position from the Controller and force feedback to create a LabView Program. Look at to this post presenting how to send/collect datas to a device connected in TCP/IP in Labview: https://forums.ni.com/t5/LabVIEW/TCP-IP-connection-between-PC-and-UR5-Universal-Robot/td-p/3153351
Don't hesitate if you have any questions or concerns,
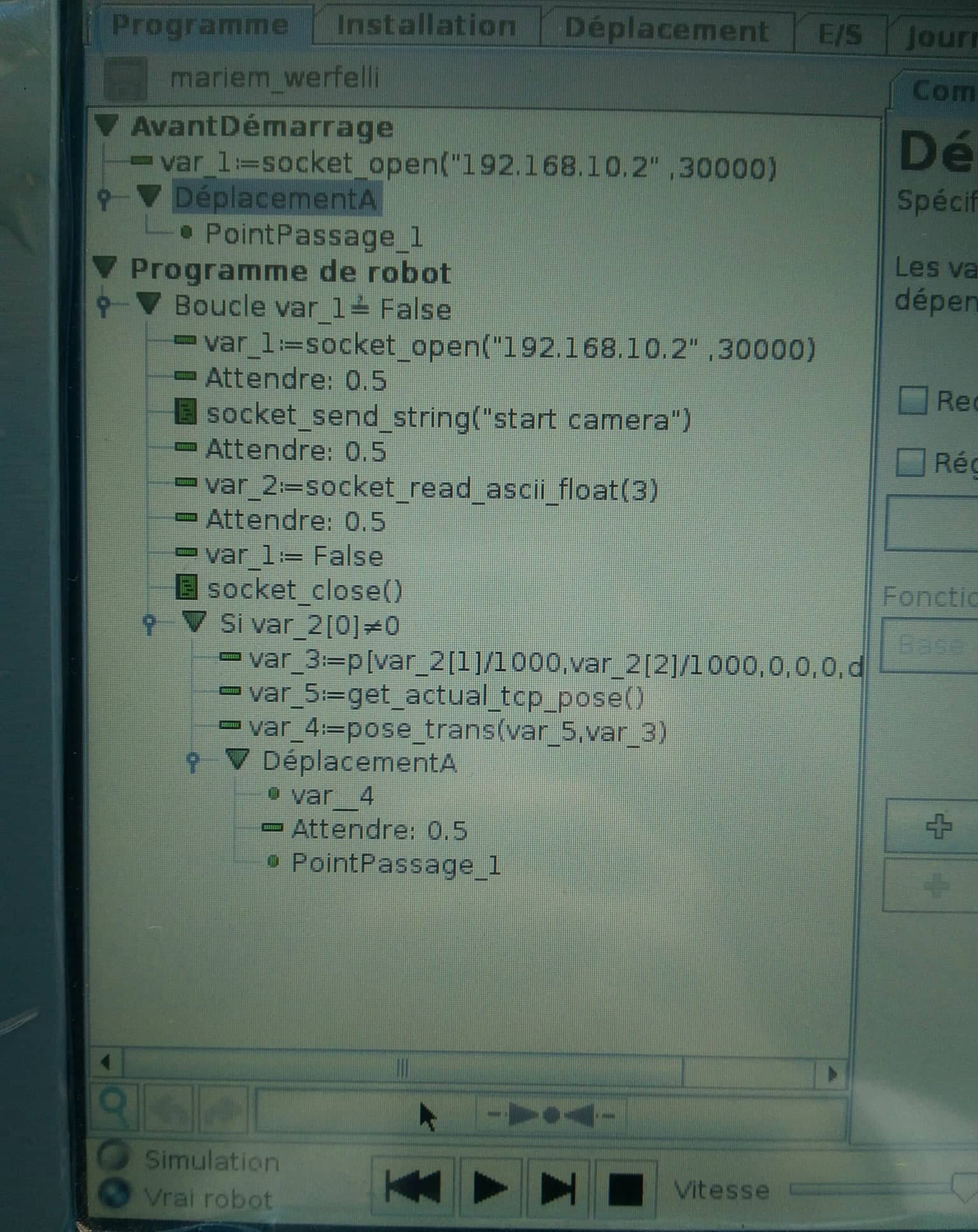
mariem_werfelli22
i have the same problem i'm trying to communicate with a UR10 Robot using labview i still don't recieve strings from my robot can any one help me ?
[Deleted User]
Hi Mariem,
All Labview examples we have seen are done with TCP/IP protocol. Maybe you could try to find help locally on TCP/IP protocol? You can also look at LabView Forum where you can find more helps on the software and different ways to test your communication.
Good Luck with your project!
Best regards,

 David_Gouffe
David_Gouffe
Hi, David Gouffé Integration Coach Coach en intégration 1-888-ROBOTIQ #275 (762-6847) 1-418-380-2788 #275 (Outside US and Canada) 1-418-655-9221 (Cell) Follow us on
You can test your UR program using Socket Test V3.0 .
This UR demo page explains it well.
https://www.universal-robots.com/how-tos-and-faqs/how-to/ur-how-tos/ethernet-socket-communication-via-urscript-15678/
Let me know it there is still a gap to cover between your Labview program and the UR demo code.
Regards,Teach, locate & pick faster with the new Robotiq Wrist Camera. Have a look!Visit us:
 mariem_werfelli22
mariem_werfelli22
hi David,
thank you the client wich is my UR is able to communicate with my server
David_Gouffe
You are welcome.
Enjoy socket communication.
Teach, locate & pick faster with the new Robotiq Wrist Camera. Have a look!
David Gouffé
Integration Coach
Coach en intégration
1-888-ROBOTIQ #275 (762-6847)
1-418-380-2788 #275 (Outside US and Canada)
1-418-655-9221 (Cell)
Follow us on
David_Gouffe
Hi,
We never had such a long delay. We even close the connection when done and re-establish a new one when needed.
Expect under 1 s connection time. Network is usually quite responsive.
The downside of it is that you connect to a single slightly limited PC managing the program, movements, I/Os and everything else running on the robot. If you overload this PC with instructions, you may end with slow responsiveness from the software of the robot.
You can also expect to be partly sync with the control loop of the robot. Faster on E-Series and slightly slower on CB.
Again:
This UR demo page explains TCP/IP socket communication well.
https://www.universal-robots.com/how-tos-and-faqs/how-to/ur-how-tos/ethernet-socket-communication-via-urscript-15678/
As our products use quite little TPC/IP communication, this is about as much as I can support you with this.
Regards,
David GoufféIntegration Coach
Coach en intégration
Robotiq is now into packaging, palletizing and sanding applications. Learn more about our new Vacuum Grippers and the Robotiq Sanding Kit.
1-888-ROBOTIQ #275 (762-6847)
1-418-380-2788 #275 (Outside US and Canada)
1-418-655-9221 (Cell)
Follow us on
Hello everyone,
I am new to the community and to programming in general. I have a UR10 robot and the FTS300 in combination with 2F gripper of Robotiq.
I would like to run a test and connect the robot with the Labview to extract some data.
I want to get a high signal when I am touching the piece I am testing and also to get the time and the distance while I am doing the test.
I know that is really general informations,ut if you can explain to me how I can make the connection,I would be grateful.