
@matthewd92 do you have a rq_reset() before your activate and wait ?
 abeachy_HG24
abeachy_HG24
 Etienne_Samson
Etienne_Samson
@abeachy_HG24 thanks for the details! Do you use rq_reset() before your rq_activate() in your program ?
 matthewd92
matthewd92
I do not. We are running 3.3.3. I didn't see that in the tutorial either but I'll have to look again but the activate doesn't work in the tutorial either so assuming it's not. I'll try adding it this afternoon and report back.Etienne_Samson said:@matthewd92 do you have a rq_reset() before your activate and wait ?
Etienne_Samson
@matthewd92 yeah the tutorial does not have it which isn't correct. I will make sure we correct this.
matthewd92
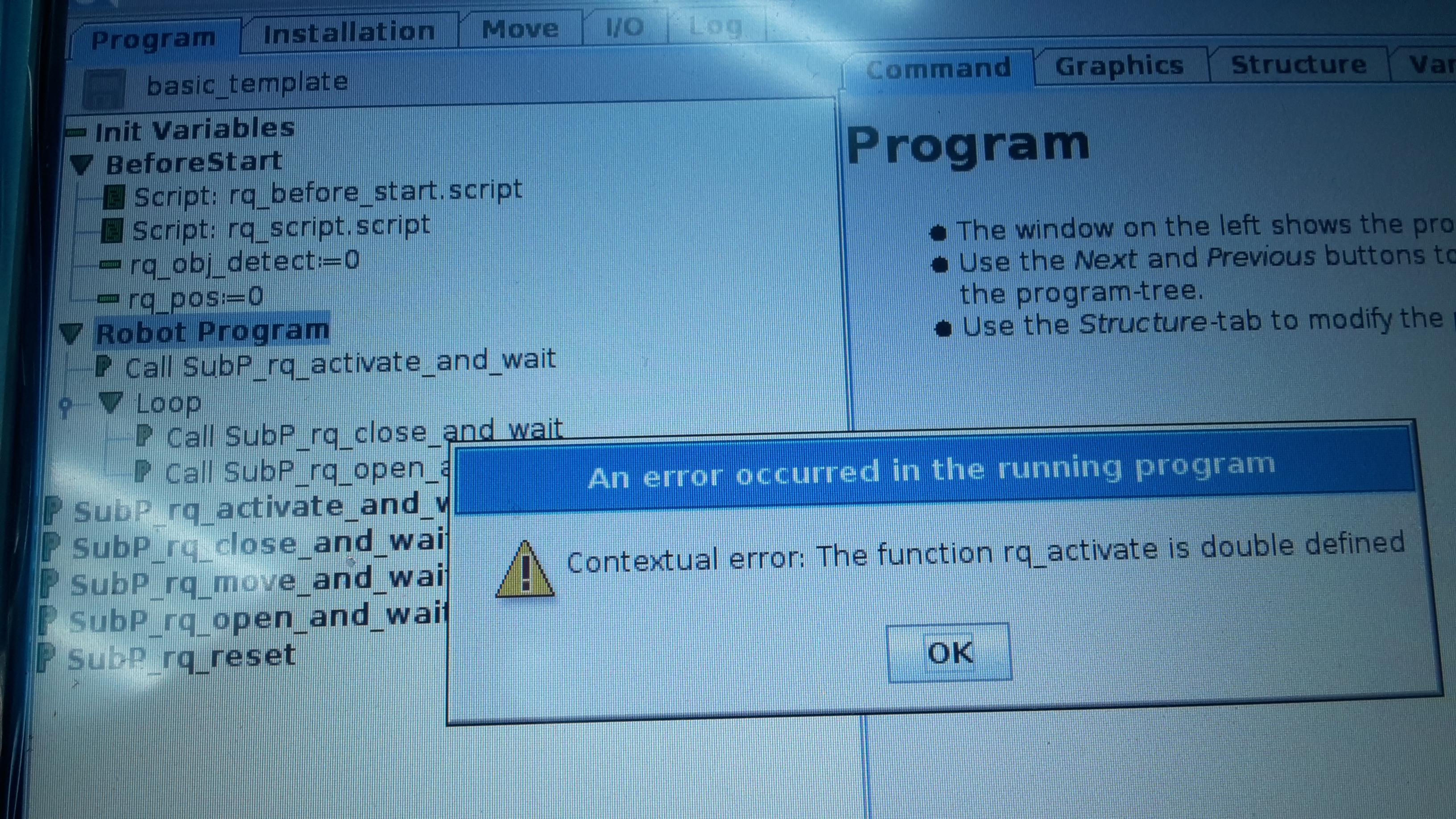
So I added the rq_reset() and it activates now!
Thanks @Etienne_Samson for the fast response.
 Annick_Mottard
Annick_Mottard
@lawrence this program was built with the legacy software package for UR. I assume you have installed the URCap package for the 2-Finger Gripper? If so, you can still use this program but you will need to suppress or delete the first two lines of the BeforeStart section (rq_before_start.script and rq_script.script). You can refer to this section of the instruction manual for further details. With the URCap, you also do not need to use subprograms to create a gripper action. You can go in the Structure tab, and then in the URCaps tab and click on Gripper to add a gripper action. Go in the Command tab to edit it.
 David_Levasseur
David_Levasseur
@Colin Uninstall the gripper URCap.
So I installed the current URCap from the support site (1.0.2) and when I place rq_activate_and_wait() at the top of the program it does not activate the gripper. I even ran the gripper tutorial UR program and it does not activate in that one either. Any suggestions on what is going on? Before I installed the caps I was running the latest pre-caps firmware and the activate and wait worked without any issues.