
 Tim_Smith
Tim_Smith
@lakshmip001
If I understand correctly, you are looking to complete a motion that looks like the following image: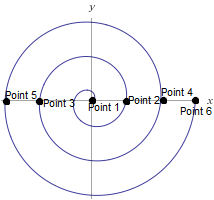
In the past, I have programmed spiral moves using the CircleMove function. To complete the spiral move depicted by the image, I would use the following series of CircleMoves:
- CircleMove from : Point 1 to Point 2
- CircleMove from : Point 2 to Point 3
- CircleMove from : Point 3 to Point 4
- CircleMove from : Point 4 to Point 5
- CircleMove from : Point 5 to Point 6
 matthewd92
matthewd92
 al is i
al is i lakshmip001
lakshmip001
 Tyler_Berryman
Tyler_Berryman
Hi, I need to make either a spiral motion orelse create a small circle and increment it gradually using offsetting for the application. The tool is small like a pen end.
Thanking you in advance.